ISP1807でBLEペリフェラルを実装するための準備
前回まででISP1807に対して、nRF52833-DKの
オンボードJ-Linkを使って任意のソフトを書き込む準備ができました。
今回は、ISP1807でSDKのBLEペリフェラルソフトを走らせるところまでやります。
これも先人たちの参考資料ほぼそのままなんですが。
ソフトデバイス
まず、ソフトデバイスってやつをダウンロードします。
こちらの記事の通りです。
qiita.com
ソフトデバイスというのは、Nordic 社が提供するBLEのプロトコルスタックライブラリの名称です。
nRFでBLEを利用するためには必須ってことですね。
Nordicのダウンロードサイトをみると、nRF52840だと、S113もしくはS140が対応するようです。

違いとしては、S113だとペリフェラル機能のみだが、省メモリ。
S140だとセントラル+ペリフェラル機能の両対応で、リッチ。
とりあえず両方ダウンロードして、書き込みはS113にしておくことにします。
nRF Connect for Desktop
ソフトデバイスをnRFに書き込むために、nRF Connect for Desktopをインストールします。
nRF Connect for Desktop - Downloads - nordicsemi.com
nRF Connect for Desktopはいろいろな開発ツールが詰まったランチャーソフトみたいなものです。
その中のProgrammerというソフトを使ってソフトデバイスを書き込みます。
さて、Programmerをインストールして起動し、さらにnRF52833-DKを接続(ISP1807をJ-Link経由で接続したもの)すると
下記のように、左上のデバイス名称欄には、「ISP1807」や「nRF52840」という名称ではなく、
nRF52833-DKという名称が表示されます。

「あれ、J-Link先のデバイスが認識されないのか??」と、初めは戸惑いましたがこれで正しいようです。
接続されているJ-Linkデバイスそのもの、という意味で、nRF52833-DKと表示されているようです。
J-Link先のデバイスとしては、Programmerのウィンドウのところに、ちゃんとNRF52840の名称が出ています。
(ちなみに、J-Linkの配線を外すと、NRF52840の表示はERRORになってしまいます。)
この状態で、File Memory layoutのところにソフトデバイスの.hexファイルをドラッグアンドドロップします。
さらに、Readアイコンをクリック。
すると下記のような表示になります。

右が現在のデバイスの状態。
左が.hexファイルのレイアウト。
この状態で、Erase&writeをクリックするとソフトデバイスが書き込まれます。
書き込み後にReadをクリックして、書き込み後の状態が.hexファイルと同様になっているかを確認します。
とりあえず、BLEビーコンを発射させる
とりあえず、サンプルソフトを書き込んで走らせます。
BLEビーコンを出してみることにします。
下記プロジェクトをDebug&Runします。
nRF5_SDK_17.1.0_ddde560\examples\ble_peripheral\ble_app_beacon\pca10056\s140\ses
と、ここで、コンパイルエラーが発生します。
SEGGER_RTT_Syscalls_SES.c:76:10: fatal error: __vfprintf.h: No such file or directory
今回もDevZoneを調べてみると、下記のような書き込みがありました。
devzone.nordicsemi.com
There has been a change in recent Segger Embedded Studio versions that require you to remove the SEGGER_RTT_Syscalls_SES.c file from the project.
というわけで、深く考えずにBuild対象から除外します。
ProjectツリーのところでSEGGER_RTT_Syscalls_SES.cを右クリックして、
Exclude from Buildをクリックです。

これでDebug & Runすると、ビーコン(アドバタイズパケット)が発射されます。
確認方法としては、スマホでLightBlueというアプリを実行すると、
NordicのManufacturer Specific Dataが載ったパケットが確認できるので、
それでうまく実行できていることがわかります。
次回はGatt通信や、セントラル側も走らせてみたいなぁと思います。
ISP1807でLチカ
前回まででnRF52833-DKのLチカができたので、
今回はISP1807でLチカをさせたいと思います。
先日買っておいた、スイッチサイエンスのISP1807(USB Type-C版)の出番です。
nRF52833-DKをオンボードJ-Linkとして接続
今回の主目的はLチカというよりかは、
nRF52833-DKをオンボードJ-Linkとして使えるようにすることが本題です。
といっても、大したことはありませんでした。

まずは、ISP1807とnRF52833-DKをジャンパーで接続します。
下記の記事を参考にさせていただきました。
今回は、ISP1807がブレイクアウトボードに実装されているので
本当にジャンパーで接続するだけです。
(ヘッダーピンのはんだ付け+ブレッドボードへの挿入は必要でしたが)
接続関係は上記の記事通りですが、以下の通り。
| nRF52833-DKの接続 | ISP1807の接続 |
| GND | GND |
| VDD_nRF | VDD_nRF |
| GND DETECT | GND |
| VTG | VDD_nRF |
| SWD_CLK | SWD_CLK |
| SWD_IO | SWD_IO |
Projectの設定
必要かどうかはわからないが、
SESのプロジェクトファイルの設定をいじりました。

画面左のプロジェクトツリーのプロジェクト名で右クリックし、Optionを選択。
DebugグループのDebuggerのところで、Target DeviceをnRF52840_xxAAにしました。
(そもそもnRF52833になっていなかったが)
また、Register Definition Fileをnrf52840.svdにしました。
あとの設定はよくわからんので、いさぎよく放置です。
いざLチカ
とりあえず、前回作ったLチカのソースコードで、
オンボードの4つのコードに関わるところはすべてコメントアウトし、
P0.23のGPIOのところだけ、生かしておきます。
幸いなことに、P0.23はISP1807でも引き出されているので
そこからブレッドボード上に、前回と同じく3.3kの抵抗とLEDを接続します。
あとはSESで、Build&Runです。
「外部ターゲットに書き込む」みたいな選択がどこかにあるのかと思ったのですが、
見当たらなかったので、とりあえずBuild&RunしてみたらちゃんとISP1807に書き込まれました。
オンボードLEDに関する記載をすべて殺したのに、nRF52833-DKのオンボードLEDは
相変わらずチカチカしていたので、nRF52833-DK側には書き込みに行っておらず、
ISP1807だけに書き込んだのは間違いなさそうです。
外部ターゲットが接続されているのを検知したら、そっちに書き込むのでしょうか。
とりあえず、目的は達成できたのでよしとしましょう。
次回はいよいよ、BLEに取り組み始めます!
nRF52833-DKの任意のGPIOでLチカをする
nRF52833-DK上にはLEDが実装されていて、SDKのサンプルではその中の4つのLEDを点滅させるようになっています。
今回は、それら既存のLEDとは異なるLEDを1つブレッドボード上に用意し、
さらに別のGPIOを操作してブレッドボード上のLEDを点滅させることにします。
(そっちの方が練習になるかと思い。)
GPIOの選択と接続
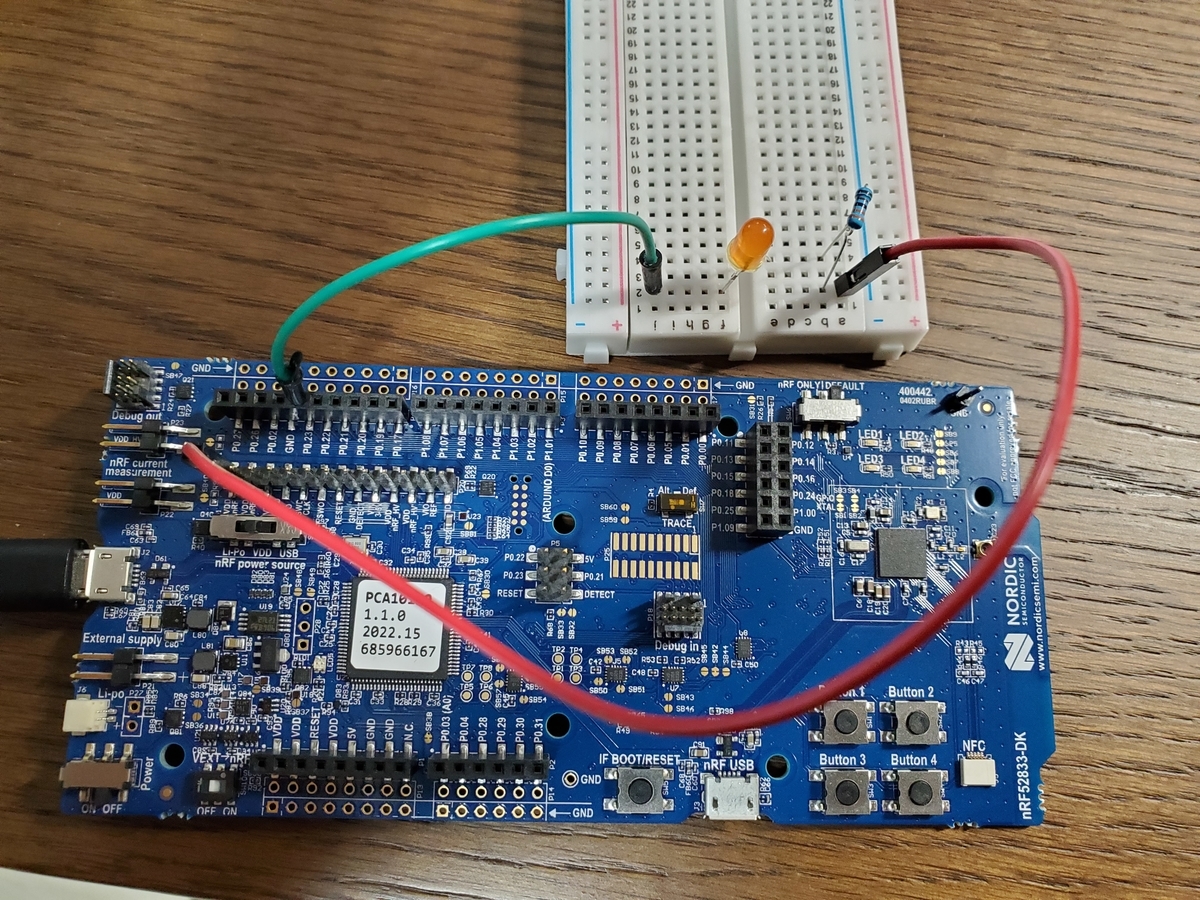
P0.23のGPIOに、LEDおよび3.3kオームの電流制限抵抗を介して、VDD_nRF(3.3V)に接続しています。
ちなみにnRF52833のGPIOのドライバビリティ(電流駆動能力)はデータシートに載っておらず。
DevZoneで検索してみると15mAという話みたい。結構流せるのね。
今回は3.3kを介して1mAなんで余裕です。
※なお、P1.01~08のGPIOも空いていて、はじめはそちら(P1.03)に接続していましたが、
うまく制御できず。(サンプルプログラムがP1.**を制御することが想定されていないのか??)
きちんと制御アドレスとかを解析すればできそうだけど、今回はそれはパスしてP0番台のGPIOを選択。
ソースコードの編集
nRF5_SDK_17.1.0_ddde560\examples\peripheral\blinky\pca10100e\blank\ses\blinky_pca10100e.emProject
をベースに編集していきます。
main.cのmain関数。
int main(void) { /* Configure board. */ bsp_board_init(BSP_INIT_LEDS); /* Toggle LEDs. */ while (true) { for (int i = 0; i < LEDS_NUMBER; i++) { bsp_board_led_invert(i); nrf_delay_ms(500); } } }
ここはそのままです。
bsp_board_initでは、GPIOを初期化をしているようです。
while文のループ内のbsp_board_led_invertでLEDを明滅させます。
簡単ですね。
bsp_board_initと、bsp_board_led_invertに
P0.23のGPIOの初期化、およびトグルの記述を追加しましょう。
それぞれ、board.cに記述があります。
まず、bsp_board_initから。
void bsp_board_init(uint32_t init_flags) { #if defined(BOARDS_WITH_USB_DFU_TRIGGER) && defined(BOARD_PCA10059) (void) nrf_dfu_trigger_usb_init(); #endif #if LEDS_NUMBER > 0 if (init_flags & BSP_INIT_LEDS) { bsp_board_leds_init(); } #endif //LEDS_NUMBER > 0 #if BUTTONS_NUMBER > 0 if (init_flags & BSP_INIT_BUTTONS) { bsp_board_buttons_init(); } #endif //BUTTONS_NUMBER > 0 }
ここもそのままです。
今回、ポイントとなるのはbsp_board_leds_init()で、ここにさらに潜ると、
static void bsp_board_leds_init(void) { #if defined(BOARD_PCA10059) // If nRF52 USB Dongle is powered from USB (high voltage mode), // GPIO output voltage is set to 1.8 V by default, which is not // enough to turn on green and blue LEDs. Therefore, GPIO voltage // needs to be increased to 3.0 V by configuring the UICR register. if (NRF_POWER->MAINREGSTATUS & (POWER_MAINREGSTATUS_MAINREGSTATUS_High << POWER_MAINREGSTATUS_MAINREGSTATUS_Pos)) { gpio_output_voltage_setup(); } #endif uint32_t i; for (i = 0; i < LEDS_NUMBER; ++i) { nrf_gpio_cfg_output(m_board_led_list[i]); } bsp_board_leds_off(); //test uint8_t led_test_pin = LED_TEST; nrf_gpio_cfg_output(led_test_pin); nrf_gpio_pin_write(led_test_pin,0); }
ここで、GPIOを出力に初期化し、さらに初期設定として消灯しています。
それぞれ、nrf_gpio_cfg_outputと、bsp_board_leds_offですね。
これを真似して追加します。testコメントから下3行です。
LED_TESTというdefineは、pca10100.hに以下のように追加しています。
#define LED_1 NRF_GPIO_PIN_MAP(0,13) #define LED_2 NRF_GPIO_PIN_MAP(0,14) #define LED_3 NRF_GPIO_PIN_MAP(0,15) #define LED_4 NRF_GPIO_PIN_MAP(0,16) #define LED_TEST NRF_GPIO_PIN_MAP(0,23)
同じようなノリで、bsp_board_led_invertにも下記のように追記します。
void bsp_board_led_invert(uint32_t led_idx) { ASSERT(led_idx < LEDS_NUMBER); nrf_gpio_pin_toggle(m_board_led_list[led_idx]); //test uint8_t led_test_pin = LED_TEST; nrf_gpio_pin_toggle(led_test_pin); }
基本的にはこれでいけるはずなんですが、最後に1つ力業が必要です。
nrf_gpio_cfg_outputの先で呼び出されるnrf_gpio_pin_port_decodeの中の
NRF_ASSERTをコメントアウトします。
nrf_gpio_pin_present_checkの先では、エラッタ処理を通したりしているようですが
ここをそのまま通すとエラー処理側に落ちてしまいます。
趣味工作の範疇ではスキップしても問題ないだろ!所詮チェックだし!ということで
潔くコメントアウトしましょう。
__STATIC_INLINE NRF_GPIO_Type * nrf_gpio_pin_port_decode(uint32_t * p_pin) { //test //NRFX_ASSERT(nrf_gpio_pin_present_check(*p_pin));
これでLチカの完成です。
次はBLEをいじりたいのですが、nRF52833-DKは技適を通していないので
BLEの電波を飛ばせません。
といわけで、ここらで本番環境であるISP1807をいじり始めたいと思います。
(nRF52833-DKはもともとオンボードJ-linkの目的で買っております)
次回は、ISP1807を利用してLチカさせたいと思います。
SEGGER Embedded Studio for ARM (V6.40)をインストール
続き。
SESのインストール
SEGGER Embedded Studio for ARM などのツールをインストールしました。
参考にさせていただいたページは下記。
shizuk.sakura.ne.jp
SESは以下からダウンロード。
SEGGER - The Embedded Experts - Downloads - Embedded Studio
nRF52のSDKを以下からダウンロード。
nRF5 SDK downloads - nordicsemi.com
J-linkのソフトは以下からダウンロード。
SEGGER - The Embedded Experts - Downloads - J-Link / J-Trace
インストール自体はポチポチ押していくだけですね。
早速SDKのサンプルをビルドし、nRF52833-DK上でRunさせたいと思います。
まずはボードナンバーの確認から。
下記のページを参照します。
Nordic Semiconductor Infocenter
nRF52833-DKのボードは、PCA10110のようです。
Lチカサンプルの下記のプロジェクトを開きます。
nRF5_SDK_17.1.0_ddde560\examples\peripheral\blinky\pca10100e\blank\ses\blinky_pca10100e.emProject
なお、起動時に下記の画面が出て、ライセンスが見つからん、と言われます。

書いてある通り、非商用目的・教育目的であれば、このままAcceptをクリックで使い続けられますが
nRF52に対して使うのであれば、正式ライセンスが発行してもらえるので、せっかくなのでゲットします。
(毎回ライセンス確認画面が出てくるのも鬱陶しいですしね)
下の方にある"Obtain a License"をクリック。
ブラウザが立ち上がるので、下記の画面の"Request your license at..."のURLをクリック。

名前やメールアドレスを登録すると、登録したメアド宛にライセンスキーが届きます。
SES上のライセンスマネージャーにて、そのライセンスキーを登録すれば完了。
Buildエラーが出る。
早速、nRF52833_DK基板とPCをUSB(ちなみにJ2コネクタ側)で接続し、
blinky_pca10100e.emProjectをBuild&Debugしてみましたが、
下記のエラーに遭遇。
".text is larger than specified size" and ".rodata is larger than specified size".
なんでサンプルでエラーが出てくるねん・・・。
しかし何も心配はいりません。nRFを選択したもう一つの理由がここで活きます。
大概のトラブルは先人たちが解決し、Nordic Devzoneに答えを書いてくれているのです。
今回の問題も下記で解決しました。
(ただ、対処方法は書いてあるけど、根本原因の理解はできず・・・ですが)
Build error - Nordic Q&A - Nordic DevZone - Nordic DevZone
上記のページに書いてある通り、
nRF5_SDK_17.1.0_ddde560\examples\peripheral\blinky\pca10100e\blank\ses\flash_placement.xml
の記載をmodifyします。
下記の通り。
You should see:
ProgramSection alignment="4" load="Yes" name=".text" size="0x4" /
and
ProgramSection alignment="4" load="Yes" name=".rodata" size="0x4" /Remove: size="0x4" from both lines resulting in:
ProgramSection alignment="4" load="Yes" name=".text" /
and
ProgramSection alignment="4" load="Yes" name=".rodata" /
https://devzone.nordicsemi.com/f/nordic-q-a/89236/build-error/374975より転載
これでコンパイルが通るようになりました。
続きは次回。
開発環境とモノの購入から
週末です。
土曜・日曜と家族が妻の実家に帰ってるから、自由な週末です。
さて、ISP1807を使ったBLE実験ですが、まだまだ序盤の環境整備です。
初心者なので、わかりやすそうなWebの情報を必死で探してます。
このブログに作業記録を残していきます。
目的としては、
・備忘録
・アウトプットすることで知識の定着を図る
ということで、あくまで自分のためのもので
世の中の役に立てるつもりは一切ない感じです。
すみません。
開発環境を調べるところからスタート
電源入れてもソフトが無いと動かないのは当たり前なので、
まずはどうやってソフトを焼くんじゃい、ってとこからです。
下記のページによれば、大きく3種類にわかれるようです。
①フル書き換え方式
・先頭から必要なバイナリをすべて書き込む。
・あらゆる領域を上書き可能
・デバッガが必要
②ブートローダー方式
・フラッシュメモリの後方にブートローダを置く。
・シリアルやUSB-CDCまたはUSB-MSD経由で書き換え可能
(=USBケーブルの接続でアップデートが可能)
③ブートローダー+VMランタイム方式
・疑似ファイルシステム領域にスクリプトを書き込む
・USB-MSD経由で書き換え可能
下にいけばいくほど、お手軽だけど、リソースのオーバーヘッドが大きいみたい。
(いずれ実際に実験して確認したいけど、今回は見切り発車)
今回は消費電力や起動時間をカリカリに切り詰めたいので、①(もしくは②)を選択します。
なお環境としては、③だとCircuitPythonが便利そう。いずれ挑戦したいです。
①を選択した今回は準備する環境として、
・SEGGER Embedded Studio
・J-link
がおすすめな様子。(同ページ参照)
SEEGER Embedded Studioについては、30万オーバーというとんでもない価格ですが、
nRF51、nRF52シリーズに限り無料で商用利用可能とのことで、これは行くしかないという感じです。
一方J-linkについては、お手頃なところとして非商用版のJ-Link EDUがあったようですが、
残念ながら2022年11月現在は流通していないようです。
www.embitek.shop
本家SEGGER社のネット販売ページもout of stockとなっていて、やはりダメそうです。
とはいえ、趣味用途で10万円する通常のJ-linkは購入はできません。
そんな状況なので、巷ではオンボードJ-linkを使うのが主流のようです。
参考になりそうなページ。
あとで実際に手を動かしながら、さらに調べていきます。
オンボードJ-Linkを利用するためには、nRFのDevelopment Kitが必要な様子です。
ここまでで、何を買えばいいかが見えてきました。
購入したもの
・ISP1807ピッチ変換基板 USB Type-C版
ISP1807ピッチ変換基板 USB Type-C版www.switch-science.com
スイッチサイエンスで3500円くらい。
BLE実験をするためのメインデバイスです。
これを選んだ理由は、nRF52840を搭載した基板の中でも最も回路がシンプルだったためです。
本当はセントラル・ペリフェラルで計2つ必要ですが、とりあえず1つ買いました。
うまく作業が進んだら複数個買うつもりです。
・nRF52833-DK
www.mouser.jp
Mouserで7000円くらいです。
オンボードJ-linkを実現するための環境です。
nRF52840ではなくnRF52833にした理由は、違うものも試してみたかったからです。
・ブレッドボード、ジャンパー線、ピンヘッダ等
必要そうなものをamazonで購入しました。
続きは次回。
BLExラズパイ センサタグ(CC2650)と接続
6月も半分が終わったよ。
週末は少しエアコンを付けちゃったよ。蒸し暑い。
そういえば、夏のボーナスは年初の予定通り支給された。
コロナ禍の影響で業績ガタ落ちだから、冬は本当に危ないかもね。
エンジニアとしてのレベルを上げないと、家族を養えなくなってしまう・・・。
といいながら、まだまだ低レベルな自分。
さてそんな中、ラズパイ工作、少しだけ進めたよ。
ついにセンサタグからデータを引っ張るとこまで。
https://github.com/Panda-papa/Raspberry/blob/master/blescan.py
データは本当にとりあえず取得だけ。
取得しているデータの精査とかはこれから。
bluepyにSensorTagというクラスがあって、
それを使えば接続~データ取得までできるみたいなんだけど、
SensorTagクラスに関してはマニュアルが無くて、ソースコード読んでんだけど
全然わけわからん。
下記ページが無ければ、とりあえずの接続すら危うい。うう・・。
qiita.com
自己啓発の意味を込めた活動なので、
こういう不明部分の車輪の再発明がしたくてたまらない。
まぁ発明まで行かなくても、せめて動作原理くらいはつかみたい。
夏休み前後くらいには、グラフ書くところくらいまでは行きたい。